






-
A bit about our robot
Read MoreSo far we’ve not given out too many details about our robot, which makes us feel a little remiss. In-order to rectify this we’ve written up some of the details we are happy to make public prior to filming. Those of you interested in such thing might well find this interesting. https://blakerobotics.org.uk/the-robot/
Posted on 3rd February 2017 by admin -
Statistics
Read MoreWe’ve put together some statistics about the construction of our robot to date, that a limited number of people will find interesting and some might even find amusing. Stats Page
Posted on 30th January 2017 by admin -
Motors motors motors
Read MoreAll the motors for our robot have finally arrived. Fellow builders looking at this post will be thinking that’s a lot of motors, that photo must include the spare motors. Well the photo does not include the spares our design really does use this many motors ! Why we use this many motors we… Read more »
Posted on 16th January 2017 by admin -
Milled parts
Read MoreThe first parts we designed and sent to be milled have arrived, this created much excitement in the Blake robotics team. These first parts are part of our weapon.
Posted on 10th January 2017 by admin -
Frame building
Read MoreThe last few days have been spent cutting and notching all the tubular steel we are using for the main frame of the robot. There is a lot of tubing sections to prepare ready for welding. Most of our first day was spent clearing space in the workshop for the new band saw and… Read more »
Posted on 2nd January 2017 by admin -
Building over Christmas
Read MoreChristmas is nearly here and a number of toys have arrived ready for us to get some serious robot building done over the Christmas holiday. We are planing on doing lots of the metal work needed for getting our chassis welded together in the new year. We also have a fair bit of soldering todo,… Read more »
Posted on 23rd December 2016 by admin -
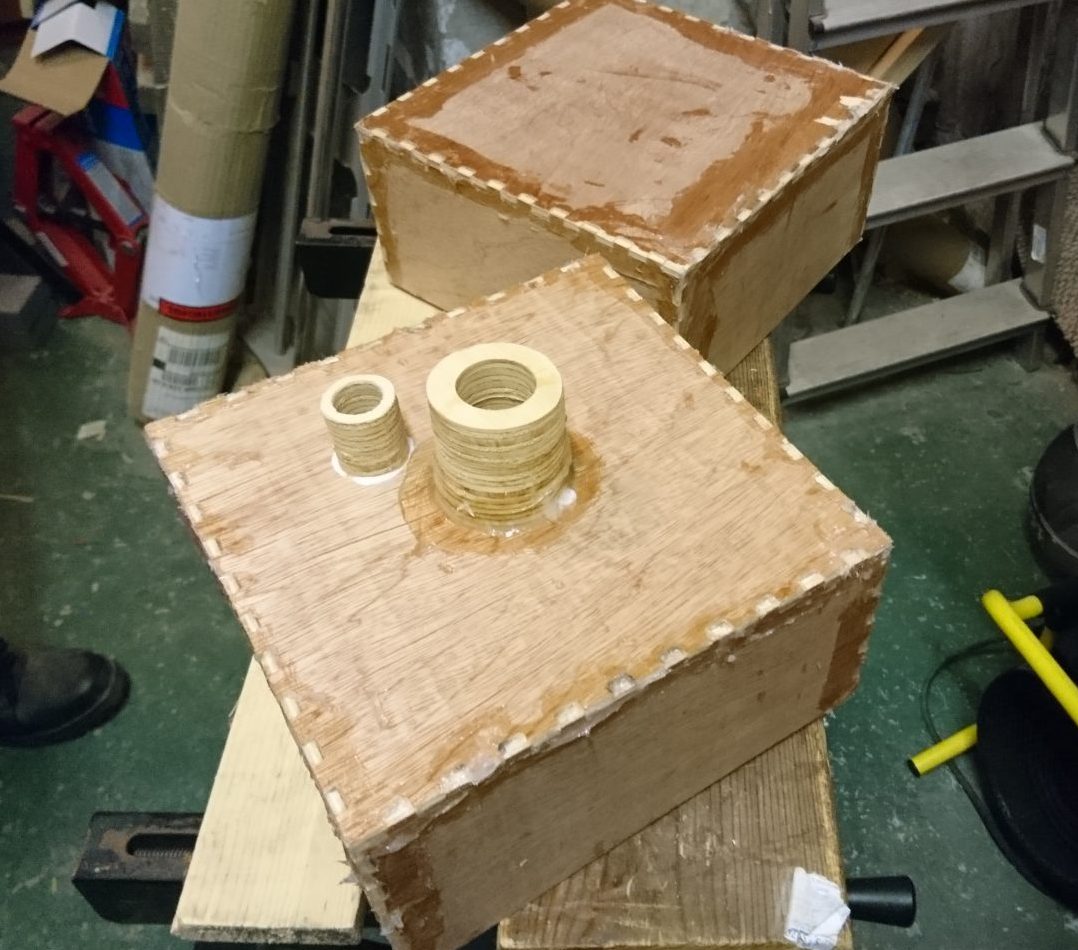
More electronics news
Read MoreOur second board (the board that runs the speed controllers) is back from the board house as is the power regulation boards Ed designed. Our first speed controller housing is also finished, and we are knocking up some removable links so we can do a test run of all our electronics together a some point… Read more »
Posted on 23rd December 2016 by admin -
The second board
Read MoreThe design for our second board which allows us to control our motors (amongst other things) is now done and with the board house, so we should have the new boards for Christmas.
Posted on 16th December 2016 by admin -
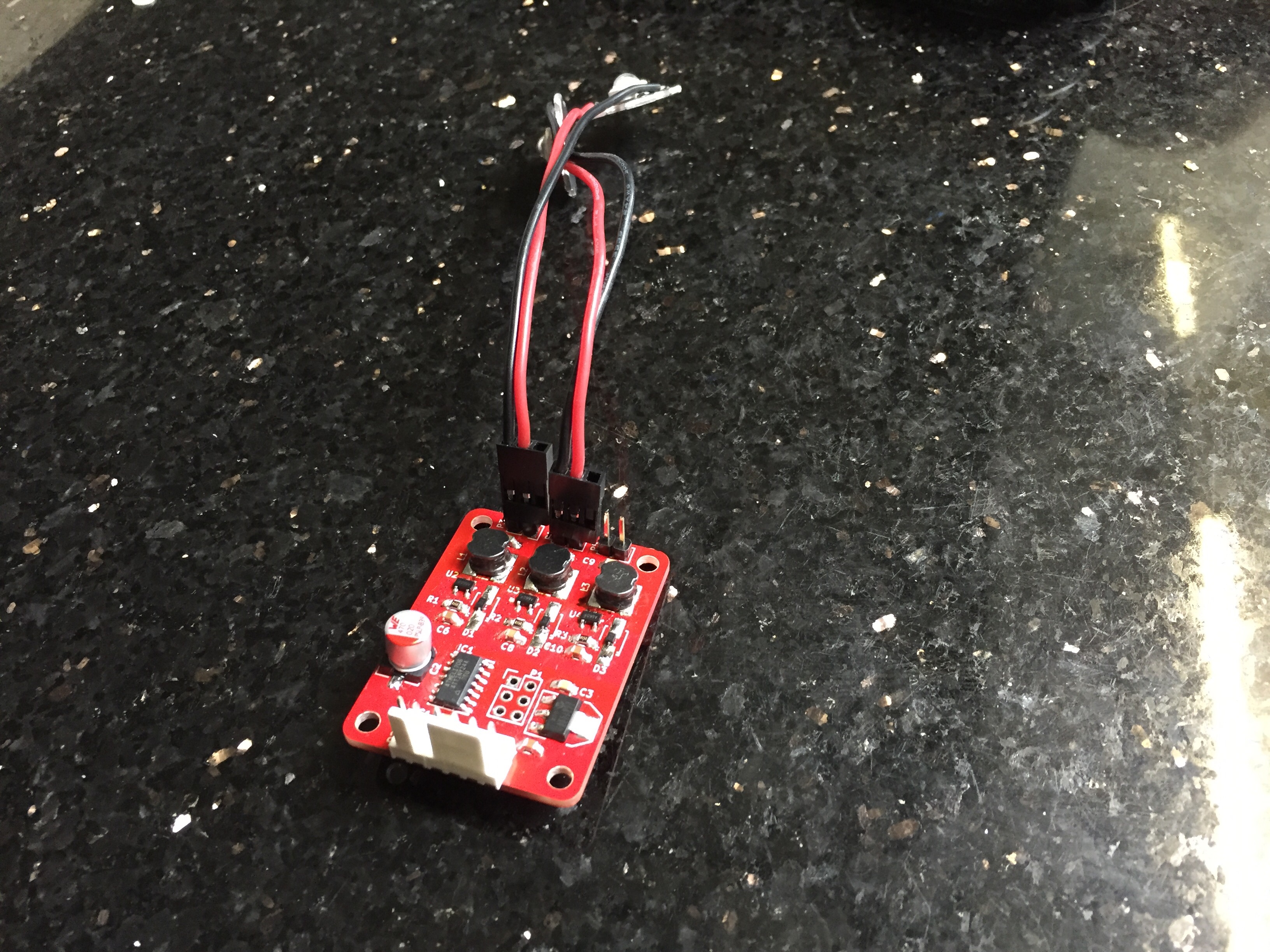
Electronics
Read MoreWe are designing a number of custom boards to run our robot, the first of which the interface to our radio modules was finished last week and sent to the board house for manufacturing. Today that first set boards arrived in the post, so we now have a number of surface mount and through hole… Read more »
Posted on 9th December 2016 by admin -
Where we are at
Read MoreWe’ve now finalised the physical design of our robot, this means all CAD models are now complete. Our electronics design is not fully completed yet however. On the physical side of things team is now switching from design phase to production phase. All our big components which we can’t manufacture ourselves, such as shapes cut… Read more »
Posted on 31st October 2016 by admin