It’s been a while since we’ve posted any thing, but the team as not been idle. Lots of stuff has been happening with the electronics, and our drive system. We’ve also started making some moulds for our tires. Including making a nice moulding box.
Those who watched the video of our weapons test, would have noticed the robot wobbled as the blade span up. This is because we had not balanced the blade, i.e. one half of the blade had more mass that the other half. This meant we had to balance the blade (add some weight to one… Read more »
We’ve been field testing our weapon. This is the first time we’ve spun the blade up using the motors, all in all a successful test. With only small tweaks needed to get it running nice and smoothly. More videos to follow.
We made a little LED driver board for doing our atmospheric lighting. It’s got a little ATtiny on-board that handles all the effects like fade in and out. We can control it over I2C from our Pi to change which effect it’s currently running. If you want to check it out and make your own… Read more »
Lots of progress this week, we have placed a load of stuff in the frame to test everything fits (it does). The first of our battery holders has been made, our drive speed controllers are now done (including a bunch of firmware modifications). Our control system is now being tested and so far is working…. Read more »
Today during my lunch I popped to the welders to pick up our now finished chassis. Finally we have something to start connecting all the parts we already completed to. The next few weeks will see a lot of visual progress now .
So here is a simple recipe if you wish to have lubricant free ball transfer units. That is point some roboteers will be be screaming “Why Why do you want lubricant free bearings, that’s the last thing you want, these people are idiots”, and while I accept we have had the odd genuine idiotic moment… Read more »
The team have all been waiting for the last week or two for our weapon bar to be cut, and at last it’s here. We’ve had two cut which we have dubbed the fubar and artical 50. The first name is what we hope it will do to other robots, and the second name relefects… Read more »
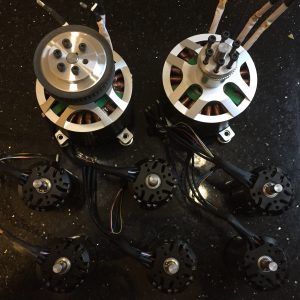
All the motors for our robot have finally arrived. Fellow builders looking at this post will be thinking that’s a lot of motors, that photo must include the spare motors. Well the photo does not include the spares our design really does use this many motors ! Why we use this many motors we… Read more »
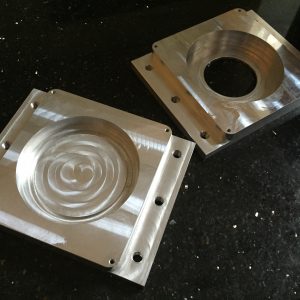
The first parts we designed and sent to be milled have arrived, this created much excitement in the Blake robotics team. These first parts are part of our weapon.